A ring of 8 magnetic digital hall sensors (one per cardinal direction) are activated by a rotating neodymium magnet attached to a shaft, creating a simple rotary encoder.
Input Pull-Up Resistors
Each hall effect sensor is wired to a digital micro-controller pin.
To prevent “floating”, input pin state is biased HIGH using pull-up resistors .
External pull-up 10k resistors are connected between hall effect sensor 5v+ and digital out pins.
If no external resistors are present GPIO pins should be setup as INPUT_PULLUP activating microcontroller internal 20k pull up resistor.
Polling for Active Pin
Each iteration of loop() reads input pins to determine active sensor.
// current and previous active sensor pin
int active = NULL;
int lastActive = NULL;
void loop() {
int v;
active = 0;
for(int i = 3; i <= 10; i++)
{
v = digitalRead(i);
if (v == 0)
{
active = i;
}
}
if (active == 0) // magnet between sensor positions
{
active = lastActive;
}
if (active != lastActive)
{
Serial.print(active);
Serial.print("\t");
Serial.println(directionLabel[active-3]);
}
lastActive = active;
}
Variables are maintained to track current and previous activation, direction is updated on position change.
If magnet is between sensor positions and no pin is active, last active position is reported.
Compass Direction Labels
Finally pin number is translated to direction (“N”, “NE”, “E” etc) by indexing into an ordered character pointer array.
// pin order direction labels
char d0[] = "NE";
char d1[] = "SE";
char d2[] = "E";
char d3[] = "S";
char d4[] = "N";
char d5[] = "W";
char d6[] = "NW";
char d7[] = "SW";
char * directionLabel[] = { d0, d1, d2, d3, d4, d5, d6, d7 };
...
// i == active sensor pin number 3 - 10
Serial.println(directionLabel[i-3]);
Interrupts – Event Driven
Instead of polling (reading sensors on each loop() iteration) we can minimise processing and power consumption by updating direction only when magnet position changes.
Less power is consumed reading current position from a variable in flash memory compared to reading each sensor input pin – decoupling logic to maintain position from code reporting current value increases efficiency.
On Arduino (Uno, Nano etc) by default specific pins trigger external interrupts. Any GPIO pin can be used as an interrupt trigger with pin change interrupts.
To setup pin-change interrupts for digital pins 3 – 10 :
volatile int irqState = 0;
unsigned long lastIrq;
int irqDelay = 100; // millisecs
ISR (PCINT0_vect)
{
irqState = 1;
}
ISR(PCINT2_vect)
{
irqState = 1;
}
void setupPinChangeInterrupt()
{
cli();
// 1 – Turn on Pin Change Interrupts
PCICR |= 0b00000001; // turn on port b (PCINT0 – PCINT7) pins D8 - D13
PCICR |= 0b00000100; // turn on port d (PCINT16 – PCINT23) pins D0 - D7
// 2 – Choose Which Pins to Interrupt ( 3 mask registers correspond to 3 INT ports )
PCMSK0 |= 0b00000111; // turn on pins D8,D9,D10
PCMSK2 |= 0b11111000; // turn on pins D3 - D7 (PCINT19 - 23)
sei(); // turn on interrupts
}
A full example of setting up Arduino pin change interrupts, checking state and reading pins from data register can be found on github and there’s a useful guide here.
Now in loop() we can check for active pin only when interrupt event occurs, software de-bounce timeout prevents multiple repeat activations:
void loop() {
if (irqState == 1 && (millis() - lastIrq > irqDelay))
{
// check for active pin...
lastIrq = millis();
irqState = 0;
}
}
Hardware Common Interrupt
A more portable solution can be implemented in hardware by adding a common interrupt line from each Hall Sensor input, isolating switch input with a diode which conducts only in one direction.
Now a change to any sensor input causes common interrupt (pin D2) to go LOW, signalling to micro-controller to check and update active magnet position.
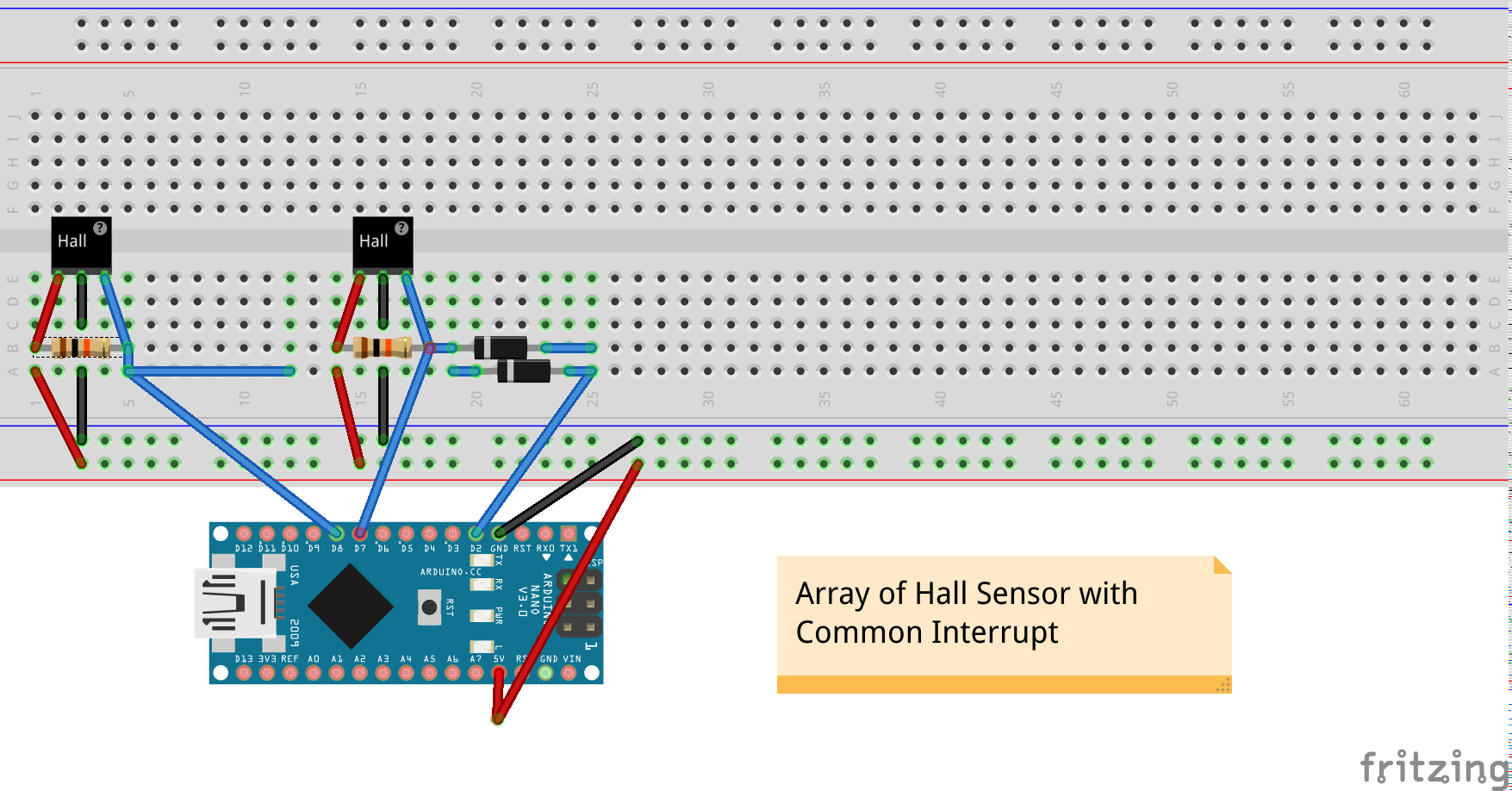
A single external interrupt can be handled by Arduino Uno/Nano pin D2
attachInterrupt(0, pin2IRQ, FALLING);
Power consumption can be reduced further by implementing deep sleep between sensor change interrupts, waking only to update state or transmit position data at intervals.
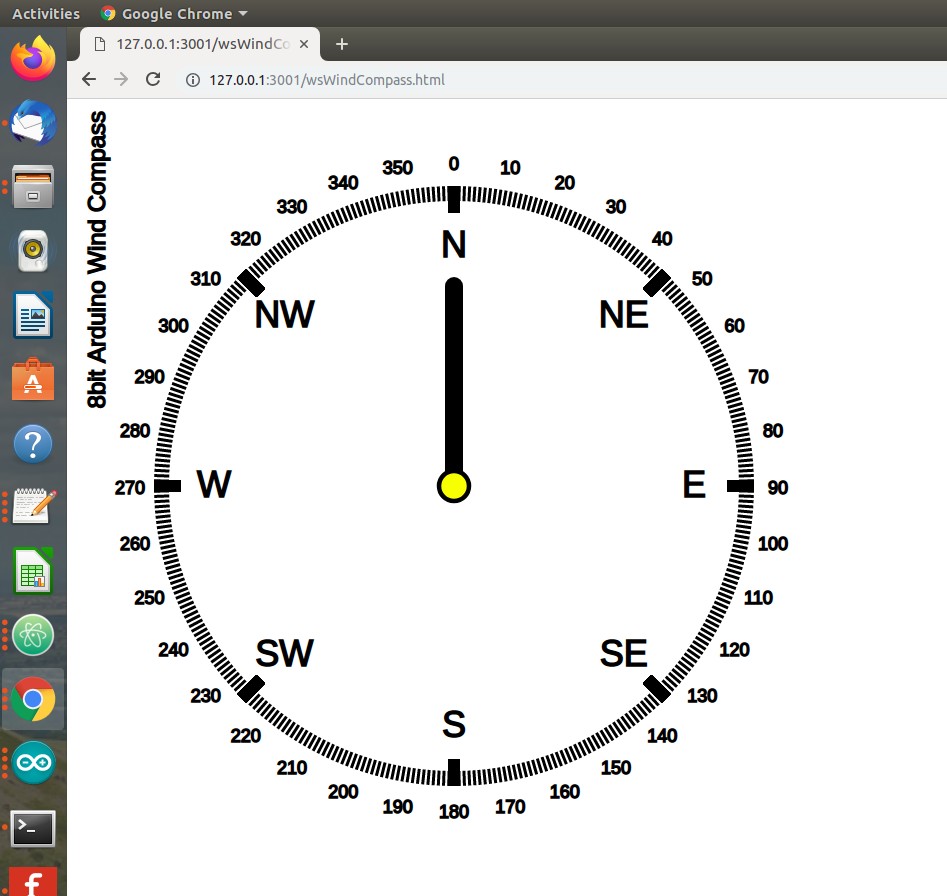
Real Time Wind Compass Web Interface
D3.js Wind Compass UI has a design inspired by Dieter Rams who worked for Braun and is single HTML file adapted from a simple clock.
Units range is changed to 360 divided into sub-divisions of 10 and 45 (8 compass directions).
User Interface (UI) Data Provisioning
A finished product might transmit data wirelessly using LORA, Wifi, Bluetooth or 433mhz RF.
For prototype testing we can use serialToWebsocket.py a script based on Python’s PySerial library to capture serial console output and relay this to a websocket.
python3 serialToWebsocket.py connected to: /dev/ttyUSB0 3 S 5 SW 4 W 6 NW
We can use Python to run a simple webserver to develop and test our interface –
python -m SimpleHTTPServer 3001
Wind Compass can now be loaded in a browser –
http://127.0.0.1:3001/wsWindCompass.html
UI demo and source code can be found below –

See it in action –
Full source code can on github:
Arduino Wind Vane Sketch:
https://github.com/steveio/arduino/tree/master/WindVane8HallSensor
Wind Compass D3.js Web UI:
https://github.com/steveio/mqttWebSocket/blob/master/wsWindCompass.html
Serial to Websocket Python Script
https://github.com/steveio/arduino/blob/master/python/serialToWebsocket.py