What types of sensor can be used for a weather vane? How to track angular position using a rotary encoder? How easy is calibration? What coding considerations for a weather station wind direction project?
Mesopotamian base-60 number system resulted in our idea of 360° in a full circle. Early compasses described 32 points and eight cardinal directions of wind, serving as navigational aids for maritime exploration.
References recorded in ancient China as early as 139 BC described “wind observing fan”. In classical Greece astronomer Andronicus constructed a weather vane at “tower of winds” in Athens. Weather vanes were known in many places of antiquity.
The word “vane” derives from Old English “fane” (Germanic Fahne) signifying “cloth, banner, flag” all of which can be deployed as visual wind direction indicators.
In modern times, absolute and incremental encoders are sensor devices measuring rotary position (angle) and motion. Resolution, precision and accuracy have distinct meaning.
Absolute encoders maintain position during power off or device reset. Incremental motion encoder data is relative, sensors of this type require “homing” (passing a known position) to calibrate.
Lets consider some types of rotary encoder –
- magnetic rotary encoder
- 360° Potentiometer
- optical encoder
- magnetic sensor array
Magnetic Rotary Encoder
Contactless magnetic encoders track a dipole magnet attached to a rotating shaft above sensor, recording rotational angle and direction through a full turn of 360° with high resolution and precision.
Internally hall sensors measure angular position of a magnetic field presented at surface, converting this to a voltage.
On chip digital signal processing (DSP) amplifies and filters planar field data before conversion by Analogue to Digital conversion (ADC).
Having no mechanical friction leads to long expected life span.
A wide operating temperature range (-40 Deg.C to 150 Deg.C) and environmental tolerances (~80% humidity) allow for a wide potential application range.
2/3 wire I2C/SPI programmable interfaces provide standardised micro-controller connectivity and control.
AS5600 Datasheet
MLX90316 Datasheet
Potentiometer 360 degree
Several commercial wind vanes targeted at maritime applications deploy a 360° potentiometer connected directly to vane shaft.
Having a compact, space efficient design, high resolution (degrees of direction) can be tracked.
Detent (stops or clicks) add rotational resistance and a fixed set of positions but increase friction.
Electro-mechanical contacts are subject to mechanical wear and surface corrosion of contact track impacting accuracy, durability and longevity.
Optical Encoder
Optical incremental encoders – IR LED / Sensor pair with a spinning disk interrupter are accurate at very high RPM rates with low sensor latency (rise time).
Resolution is determined by interrupt light “chopper” disk design and relative position is measured by counting rotational sensor ticks.
Quadrature or two channel encoding, with a phase offset, is employed to determine rotational direction.
Calibration, including between device reset/power off is a challenge – sensor pulse counting during rotation must be relative to a fixed/known initial position.
Magnetic Sensor Array
Early compasses recorded 32 points to indicate winds as a navigational aid to sailors.
Wiring 32 sensors together requires considerable soldering & assembly skill. If 4 or 8 bit resolution is sufficient, magnetic linear hall or reed switches might be used – both are contactless, low cost and widely available.
Sensors arranged in a ring array activated by a rotating magnet allow a micro-controller to track position changes.
One approach is to use polling and a GPIO pin per sensor. Pin change interrupts can also be used for state notification.
An analogue multiplexer (CD4051) reduces number of required input pins to 4 (3 address pins, 1 data), optionally a common interrupt enables this to work with an event (interrupt) driven model.
Sensor Implementation – Polling vs Event Model
Polling, reading position at a set frequency (interval), provides consistency and allows simple computation analysis – roll-up averages for example. Higher frequency sampling results in higher precision.
In event model – an interrupt is triggered when sensor state (position) changes.
Recording position data only when direction changes is a low power consumption approach, extending operating duration of a battery powered device, especially on windless days.
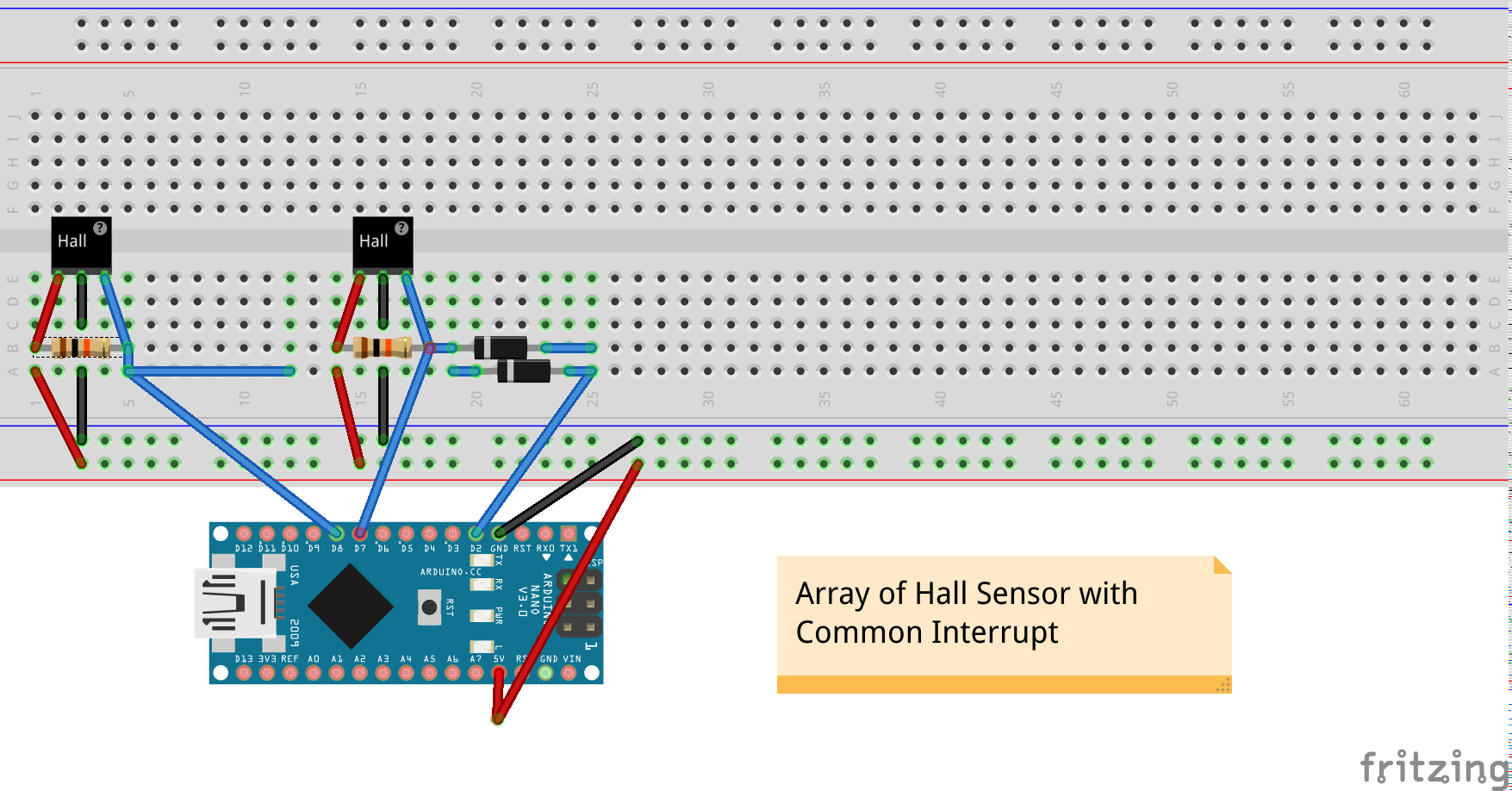
To implement event driven design with a multiplexer poses a challenge, at circuit level a common interrupt line wired with isolating diodes to each sensor is required.
A change to any individual sensor triggers an interrupt, micro-controller can then check each multiplexer channel to determine position.
Calibration – how to determine magnetic north?
A compass bearing is required to determine direction relative to cardinal directions.
Wind vanes in a fixed position are manually calibrated. Electronic sensor devices can resolve orientation relative to magnetic compass.
Wind direction is defined by World Geodetic System (WGS) as direction from which wind blows and is measured clockwise from geographical north, namely, true north (meteorology) or in aviation reporting relative to magentic north.
Visualisation – Wind Rose and Polar Distribution Charts
Wind roses, a type of polar bar chart provide a visualisation of wind distribution: direction and magnitude (velocity) frequency at a location over a given time interval.